








Gran oferta, sistema de movimiento simulador de 6 DOF
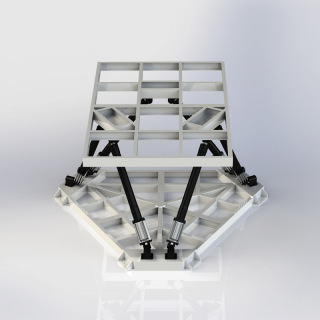
Nuestra plataforma de movimiento 6DOF puede simular una variedad de poses de movimiento espacial y se puede aplicar ampliamente a varios simuladores de entrenamiento, como simulador de vuelo, simulador de barco naval, plataforma de simulación de despegue y aterrizaje de helicóptero naval, simulador de tanque, simulador de conducción de automóviles y conducción de trenes. simulador y película dinámica, equipo de entretenimiento, etc.

Características de la plataforma de movimiento 6 DOF:
1. Hecho de acero que tiene una apariencia hermosa, estructura compacta, bajo ruido de funcionamiento y es fácil de mantener.
2. El sistema servo con control digital completo se usa para un control preciso, el movimiento de la plataforma es suave y continuo, también con una respuesta rápida a alta velocidad y una operación estable a baja velocidad.
3. Adoptando nuestra propia rótula dedicada de robot paralelo, la carrera máxima puede alcanzar los 35° con alta precisión.
4. El cilindro eléctrico adopta una nueva estructura de conexión directa con un motor integrado en su interior que puede hacerlo lo suficientemente compacto. Mientras tanto, el tornillo de precisión ultra silencioso también se aplica en el cilindro con muy poco ruido.
5. Todos los bloques inclinados se completan en el centro de mecanizado que puede garantizar la precisión de posicionamiento de cada lado.
6. Usando una tarjeta de control de desarrollo propio, integra una variedad de modelos de algoritmos y modelos de datos de plataforma 6 DOF, puede realizar las operaciones matemáticas correspondientes al recibir la fecha de pose de la computadora superior y luego calcular la carrera de seis cilindros. También puede ajustar la suavidad y la velocidad de la operación de la plataforma.
Especificación principal:
Rendimiento de sistema
Postura Unidad Amplitud Velocidad Tirón milímetro ±500 200 mm/s Aumento milímetro ±400 200mm/s Influencia milímetro ±400 200mm/s Paso ° ±30 10°/s Rollo ° ±30 10°/s Guiñada ° ±30 10°/s
Especificación de carga útil
| Peso del Producto | 5021 kg |
| Carga útil | 4000 kg |
Dimensiones del producto
| Longitud | 5000mm |
| Ancho | 3000mm |
| Altura mínima | 2670mm |
Requerimientos de energía
| Fuente de alimentación | 380V trifásico |
| Conexión | ethernet |
Sistema de control (Cuadro eléctrico)

Sistema de control: el software de control integrado se ejecuta en el controlador principal, y el controlador de movimiento utiliza el controlador de movimiento de bus de alto rendimiento Gugao, y utiliza el algoritmo cinemático directo e inverso desarrollado de forma independiente por nuestra empresa para realizar el control de movimiento de los seis grados. Plataforma de movimiento de libertad.
El software de control incluye, entre otros, los siguientes módulos funcionales: módulo de función de autoinspección del sistema, módulo de función de conexión de red, módulo de función de configuración de parámetros, módulo de función de máquina de estado, módulo de función de preprocesamiento de datos, módulo de función de planificación de trayectoria, módulo de función de cálculo de cinemática , módulo de función de comunicación de bus, módulo de función de E/S digital, módulo de función de retroalimentación de estado, módulo de función de alarma de falla y módulo de función de seguridad.
El software de control proporciona la interfaz de desarrollo secundaria y abre la interfaz y el protocolo de comunicación a la Parte A. La plataforma de seis grados de libertad funciona sin problemas, sin problemas y sin tropiezos. Los algoritmos de cinemática directa e inversa retroalimentan la actitud de la plataforma o los datos de posición del cilindro eléctrico en tiempo real. El algoritmo tiene la función de protección de seguridad interna para la plataforma, que no causará daños a la plataforma si el usuario ingresa los datos por error.




