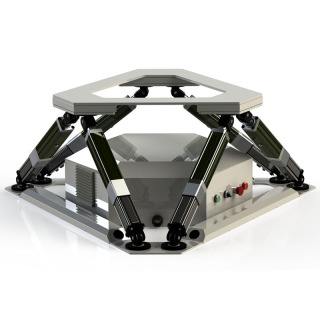
Base de movimiento del simulador de conducción de automóviles
Las bases de movimiento se utilizan ampliamente en varios simuladores de entrenamiento, como simuladores de vuelo, simuladores de barcos, plataformas de simulación de despegue y aterrizaje de helicópteros navales, simuladores de tanques, simuladores de conducción de automóviles, simuladores de conducción de trenes, simuladores de terremotos, películas dinámicas, equipos de entretenimiento y otros campos. , e incluso en el atraque de naves espaciales y el atraque de reabastecimiento de combustible de aviones cisterna; Equipo de entretenimiento cultural, nuevo equipo de experiencia de entretenimiento interactivo, simulación de ingeniería, evaluación de diseño, prueba, experimento, capacitación de tareas, evaluación de capacitación, simulación ambiental, recurrencia de eventos, etc.
Especificación principal:
Rendimiento de sistema
Postura Unidad Amplitud Velocidad Tirón milímetro ±160 375 mm/s Aumento milímetro ±160 375 mm/s Influencia milímetro ±160 375 mm/s Paso ° ±16 15°/s Rollo ° ±16 15°/s Guiñada ° ±16 15°/s
Especificación de carga útil
| Peso del Producto | 349 kg |
| Carga útil | 1000 kg |
Dimensiones del producto
| Longitud | 2000mm |
| Ancho | 1515mm |
| Altura mínima | 780mm |
Requerimientos de energía
| Fuente de alimentación | 380V trifásico |
| Conexión | ethernet |
Sistema de control (Cuadro eléctrico)

Sistema de control: el software de control integrado se ejecuta en el controlador principal, y el controlador de movimiento utiliza el controlador de movimiento de bus de alto rendimiento Gugao, y utiliza el algoritmo cinemático directo e inverso desarrollado de forma independiente por nuestra empresa para realizar el control de movimiento de los seis grados. Plataforma de movimiento de libertad.
El software de control incluye, entre otros, los siguientes módulos funcionales: módulo de función de autoinspección del sistema, módulo de función de conexión de red, módulo de función de configuración de parámetros, módulo de función de máquina de estado, módulo de función de preprocesamiento de datos, módulo de función de planificación de trayectoria, módulo de función de cálculo de cinemática , módulo de función de comunicación de bus, módulo de función de E/S digital, módulo de función de retroalimentación de estado, módulo de función de alarma de falla y módulo de función de seguridad.
El software de control proporciona la interfaz de desarrollo secundaria y abre la interfaz y el protocolo de comunicación a la Parte A. La plataforma de seis grados de libertad funciona sin problemas, sin problemas y sin tropiezos. Los algoritmos de cinemática directa e inversa retroalimentan la actitud de la plataforma o los datos de posición del cilindro eléctrico en tiempo real. El algoritmo tiene la función de protección de seguridad interna para la plataforma, que no causará daños a la plataforma si el usuario ingresa los datos por error.