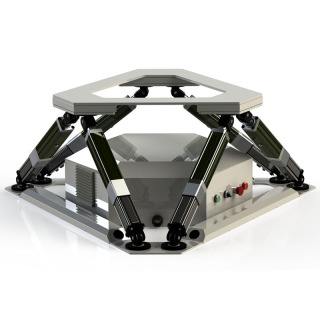
Base de movimiento del simulador de barcos
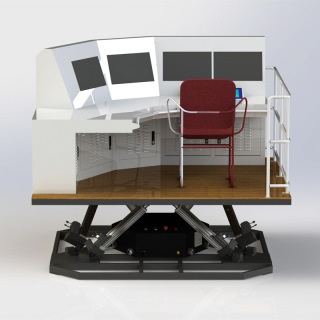
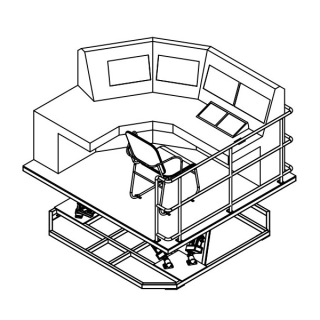
El producto simulador de navegación equipado con plataforma de movimiento 6-DOF puede satisfacer diversas necesidades de capacitación comercial, como capacitación de tripulación, capacitación de pilotos, capacitación de operadores de VTS, capacitación de operadores de radio GMDSS y otra capacitación comercial especial (operación de remolcadores, operación de pesca, navegación en hielo área, navegación interior, operación de yates, emergencia de derrames de petróleo, búsqueda y rescate), y también se puede utilizar para investigación científica como demostración de ingeniería de puertos y navegación, verificación de equipos marinos inteligentes, etc.
La plataforma de movimiento de seis grados de libertad puede simular la actitud de movimiento del barco en el proceso de operación, realizar la prueba del equipo del barco, proporcionar a los usuarios datos completos de prueba del estado del mar y ayudar y cooperar con los usuarios para completar el experimento de prueba del equipo de la nave; Puede proporcionar equipos de entrenamiento de conducción de acuerdo con los requisitos del usuario y equipos virtuales para simular el entorno de conducción del barco y la postura de movimiento. Podemos proporcionarle personalización del producto, interfaz de entrada de espectro de olas personalizada, cumplir con los requisitos del usuario para las condiciones del mar y combinar la tecnología VR para restaurar la escena y el medio ambiente.

Especificación principal:
Rendimiento de sistema
| Postura | Unidad | Amplitud | Velocidad |
| Tirón | milímetro | ±200 | 250 mm/s |
| Aumento | milímetro | ±200 | 250 mm/s |
| Influencia | milímetro | ±200 | 250 mm/s |
| Paso | ° | ±25 | 25°/s |
| Rollo | ° | ±25 | 25°/s |
| Guiñada | ° | ±25 | 25°/s |
Especificación de carga útil
| Peso del Producto | 330 kg |
| Carga útil | 500 kg |
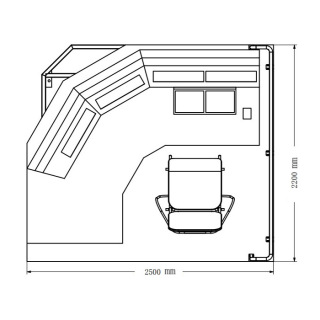
Dimensiones del producto
| Longitud | 2500mm |
| Ancho | 2200mm |
| Altura mínima | 820mm |
Requerimientos de energía
| Fuente de alimentación | 380V trifásico |
| Conexión | ethernet |
Sistema de control (Cuadro eléctrico)

Sistema de control: el software de control integrado se ejecuta en el controlador principal, y el controlador de movimiento utiliza el controlador de movimiento de bus de alto rendimiento Gugao, y utiliza el algoritmo cinemático directo e inverso desarrollado de forma independiente por nuestra empresa para realizar el control de movimiento de los seis grados. Plataforma de movimiento de libertad.
El software de control incluye, entre otros, los siguientes módulos funcionales: módulo de función de autoinspección del sistema, módulo de función de conexión de red, módulo de función de configuración de parámetros, módulo de función de máquina de estado, módulo de función de preprocesamiento de datos, módulo de función de planificación de trayectoria, módulo de función de cálculo de cinemática , módulo de función de comunicación de bus, módulo de función de E/S digital, módulo de función de retroalimentación de estado, módulo de función de alarma de falla y módulo de función de seguridad.
El software de control proporciona la interfaz de desarrollo secundaria y abre la interfaz y el protocolo de comunicación a la Parte A. La plataforma de seis grados de libertad funciona sin problemas, sin problemas y sin tropiezos. Los algoritmos de cinemática directa e inversa retroalimentan la actitud de la plataforma o los datos de posición del cilindro eléctrico en tiempo real. El algoritmo tiene la función de protección de seguridad interna para la plataforma, que no causará daños a la plataforma si el usuario ingresa los datos por error.